Detectors¶
Here we list detector specific information userful for troubleshooting and configure areadetector.
HDF Plugin error¶
In same situation the HDF plugin for areadetector will fail to save with error=3. If this happens these steps will clear the error:
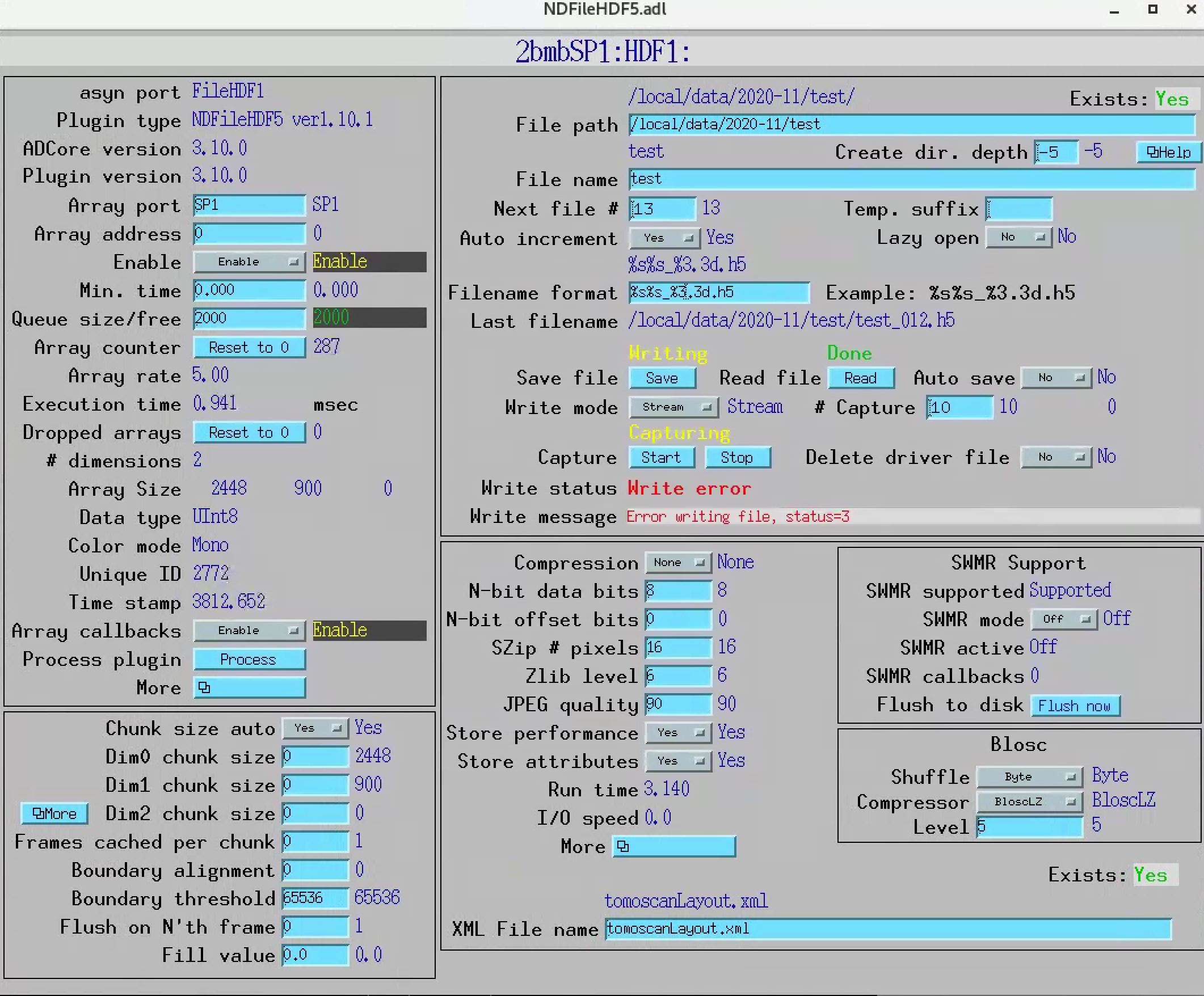
make sure TomoScan is runnung. This is because the source of the attribute “HDF5FrameLocation” is “$(TS)HDF5Location” which is used by the hdf layout file as <global name=”detector_data_destination” ndattribute=”HDF5FrameLocation” />
go to the hdf plugin screen and delete the XML File name “TomoScanLayout.xml”
select save and set the camera in continous data collection mode, taking images now should not show any error is gone
keep the camera running, go to the hdf plugin screen and an incorrect XML File name name e.g. “TomoScanLayout.xm”
enter the correct file name TomoScanLayout.xml
Flir¶
The area detector IOC controlling the FLIR camera run on the linux machine named pg10ge. To check the area detector status:
user2bmb@pg10ge$ 2bmSP2.sh status
To stop/restart area detector use
user2bmb@pg10ge$ 2bmSP2.sh start
user2bmb@pg10ge$ 2bmSP2.sh stop
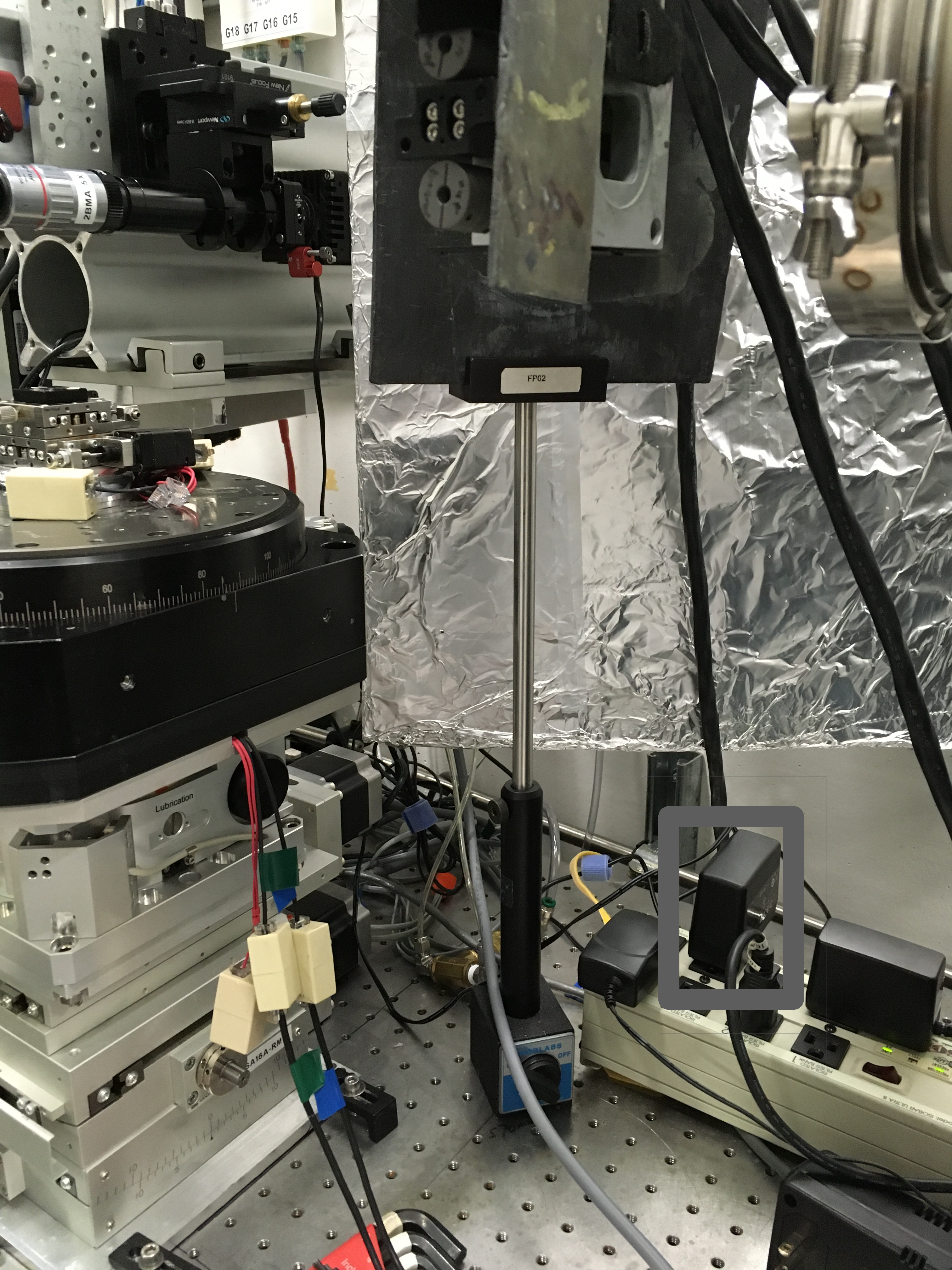
To power cycle the camera unplug the power supply:
Warning
If you need to reboot pg10ge keep the FLIR camera on. If you need to power cycle the camera and reboot pg10ge: 1. Turn off the camera. 2 Turn on the camera. 3. Reboot pg10ge.
Warning
If the area detector fails to boot even after a camera power cycle, it means that the last auto save file (auto_setting.sav) is corrupted or that the network adaper the camera is connected to needs a reboot. To recover from the first you need to replace the corrupted auto save with a good one, if this is not avaialble just delete all autosave files. For recovering from the the network adaper issue reboot the linux machine (pg10ge) with user2bmb@pg10ge $ sudo /usr/sbin/reboot.
To stop areadetector:
user2bmb@pg10ge$ 2bmSP2.sh stop
then restart areadetector with:
user2bmb@pg10ge$ ~/2bmSP2.sh start
Warning
If the camera is not performing at the max speed (when set at 8-bit should run at 160 fps) but only runs at a lower speed (~95 fps or even lower) check the settings for the ISP Enable parameter is set to No. Also increase the DeviceLinkThroughputLimit up to the same value as DeviceLinkSpeed.
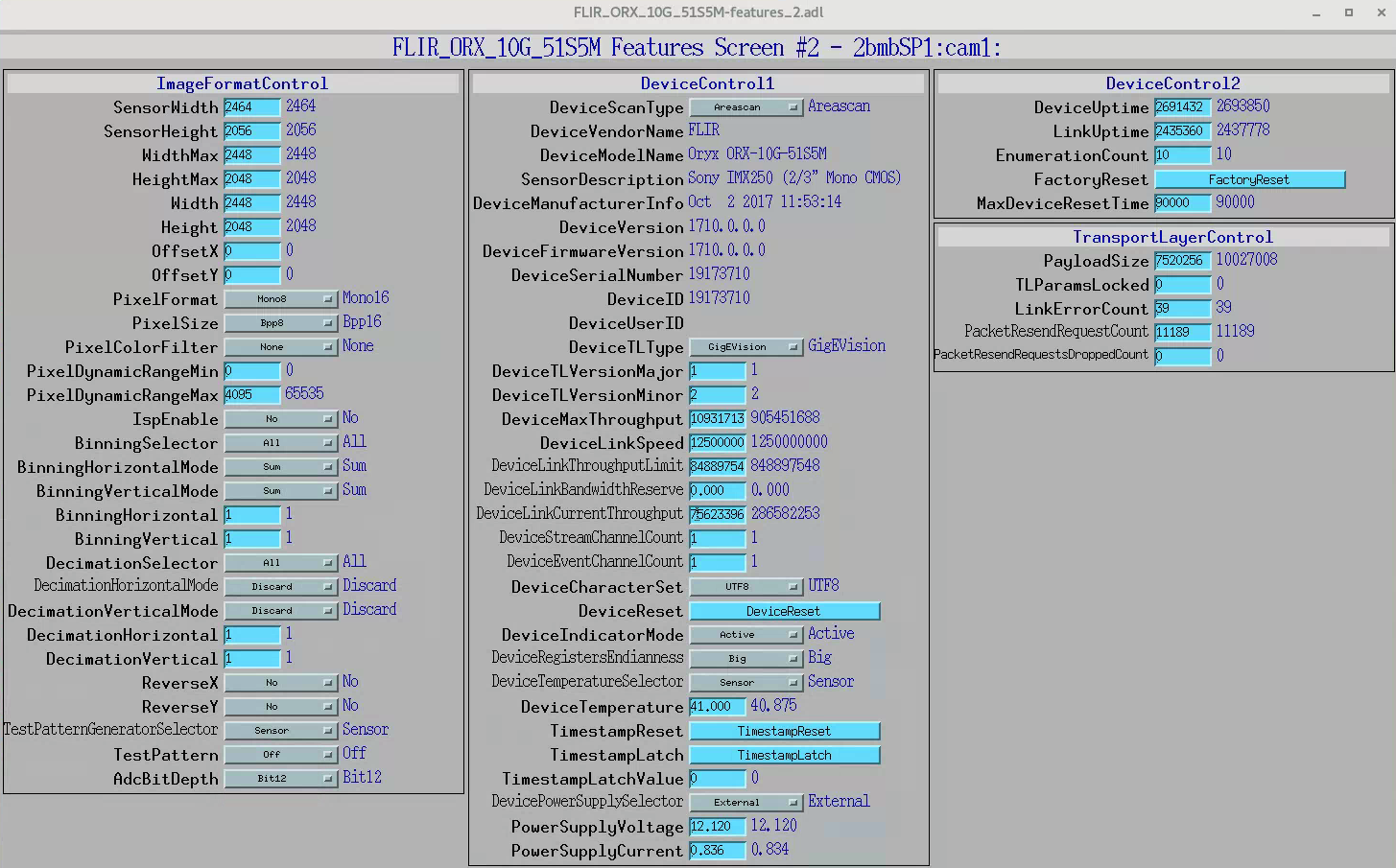


These are located in the Camera-specific features/Features #2 screen of the ADSpinnaker.adl screen. Check also the github issue for more details.
Circular Buffer¶
The circular buffer plug-in is used in streaming mode to store ‘past’ images (taken before the capture starts) so that the recording includes data ahead of the event that triggered the data saving. The maximum number of frames buffered in the NDPluginCircularBuff plugin can be increased (within the available computer memory) by editing:
# The maximum number of frames buffered in the NDPluginCircularBuff plugin
epicsEnvSet("CBUFFS", "1500")
in the st.cmd.base file located in /net/s2dserv/xorApps/PreBuilts/areaDetector-R3-10/ADSpinnaker-R3-0/iocs/spinnakerIOC/iocBoot/iocSpinnaker:
user2bmb@pg10ge$ cd /net/s2dserv/xorApps/PreBuilts/areaDetector-R3-10/ADSpinnaker-R3-0/iocs/spinnakerIOC/iocBoot/iocSpinnaker
user2bmb@pg10ge$ sublime st.cmd.base
Point Grey¶
The area detector IOC controlling the Point Grey camera run on the linux machine named lyra. To check the area detector status:
[user2bmb@lyra]$ 2bmbPG3 status
To stop/stop area detector use
user2bmb@pg10ge$ 2bmbPG3 start
user2bmb@pg10ge$ 2bmbPG3 stop