Robot¶
The tomography instrument is using a Universal Robots e-Series for sample loading and unloading.
Coordinate System¶
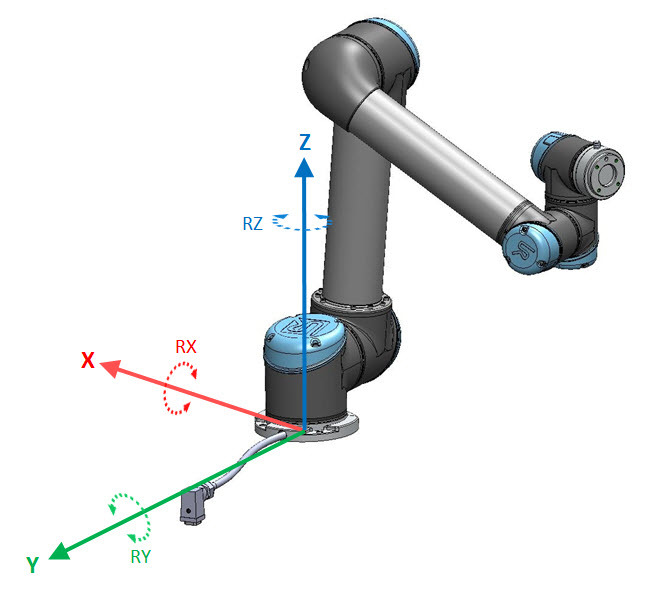
The Base coordinate system is a Right-hand coordinate system, where Y is into the robot cable and Z-axis upwards through the centre of the Base joint.
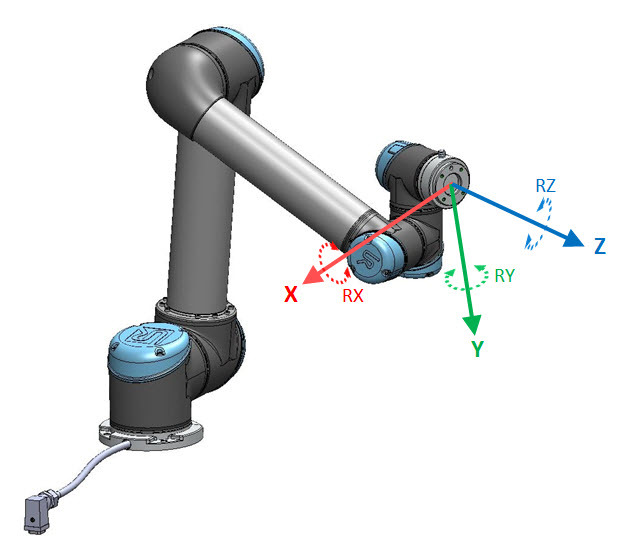
The Tool coordinate system is a Right-hand coordinate system, where Y is away from the Tool connector, and Z is normal to the tool flange.
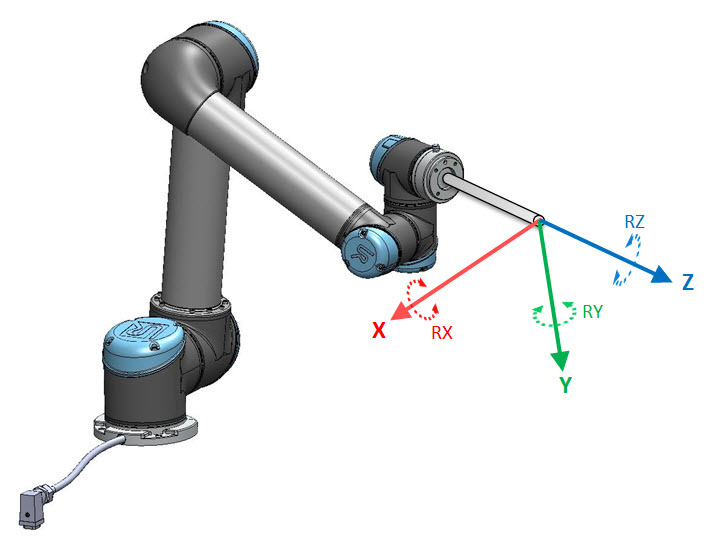
The Tool offsed will shift the Tool coordinate system as shown.
Documentation:
Testing¶
To confirm communication wiht the robot, run Dashboard.py then type:
Enter command: get robot model UR3
The full list of Dashboard server commands is here